
Duke Biomechanics and Wearable Robotics Lab*
Assistant Professor, Mechanical Engineering & Materials Science
*First cohort of students will vote on a lab name
Official lab website under construction - stay tuned!
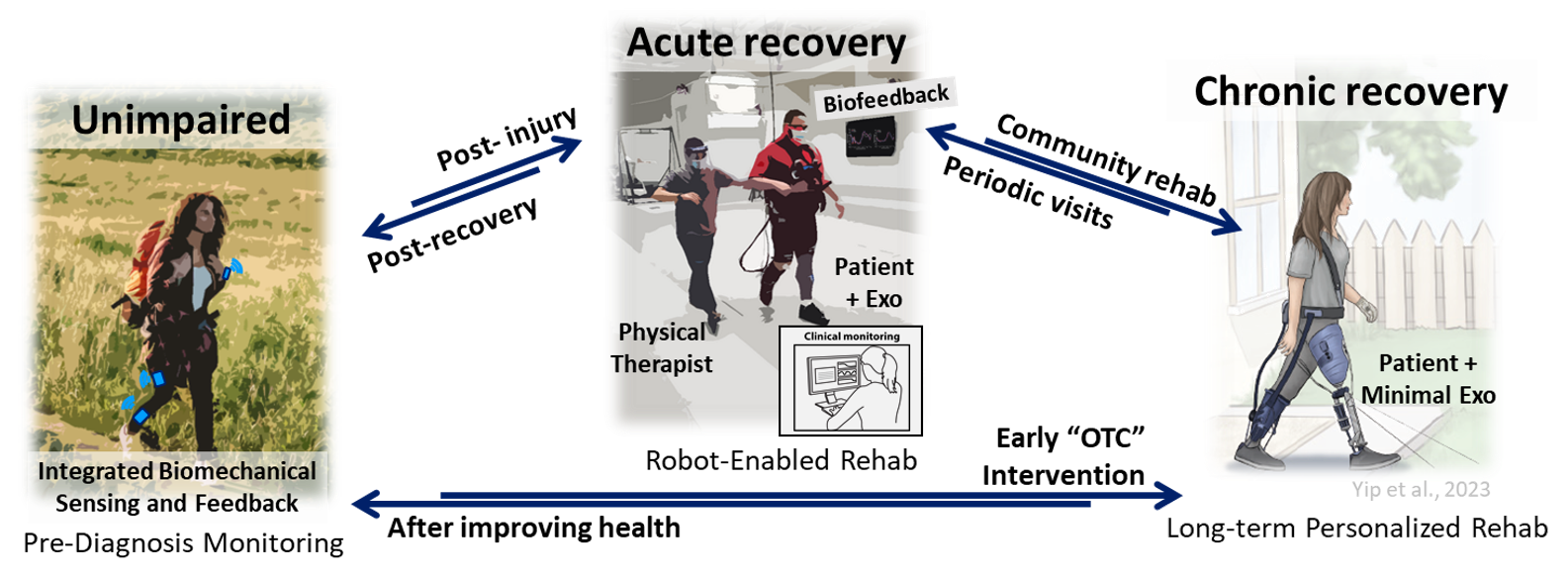
Our Vision: Improving Human Mobility across the Lifespan with Intelligent Systems
Developing personalized tools to train and retrain movement in the community
Driving Questions
How can we learn the right training objectives for each person?
How can we model and predict the outcome of training?
How can we optimize control to maximize user learning?
Lab mission: Leverage wearable robotics and principles of neuromotor control in the real-world to enhance quality of life over varying timescales.
What you will work on…
An adaptive and individualized ultrasound-based control strategy reduces the energetic cost of walking across speeds and inclines
Biomechanics-inspired wearable robotics control
Neuromotor adaptation during training
Two minutes of targeted resistance alters chronic post-stroke gait dynamics and results in short-term retention of newly learned movement patterns
Multi-modal machine learning models that combine instrumented insoles with inertial measurement units track post-stroke gait dynamics
Paper: Swaminathan, Choe, Kim et al., 2025. IEEE Trans. Neural Syst. Rehabil. Eng.